Cintreuse de panneaux semi-automatique EMBC 1402
spécification des produits
| Non. | Nom | Paramètre | Unité |
| 1 | Longueur maximale | 1400 | mm |
| 2 | Largeur maximale | 1400 | mm |
| 3 | Min.Longueur de pliage | 200 | mm |
| 4 | Largeur de pliage minimale | 260 | mm |
| 5 | Épaisseur de flexion maximale (MS, UTS410N/mm²) | 1 | mm |
| 6 | Épaisseur de flexion minimale (MS, UTS410N/mm²) | 0,5 | mm |
| 7 | Hauteur de flexion maximale | 170 | mm |
| 8 | Mode de réglage de la longueur de la presse supérieure Manuel | ||
| 9 | Consommation énergétique moyenne | 2.2 | KW |
| 10 | Poids | 15 | T |
Caractéristiques et structure principale
En termes de conception et de fabrication de machines, Hebei Hanzhi CNC Machinery Co., Ltd.se concentre principalement sur les points suivants :
1. Un concept marketing qui recherche l’aspect pratique et permet à l’utilisateur d’économiser chaque centime.
2. Un concept de conception très fiable et précis.
3. Matières premières de haute qualité, pièces achetées et techniques de traitement exquises.
4. Mettre davantage l'accent sur la facilité d'utilisation, l'entretien et la sécurité.
5. Faible taux de maintenance et coûts de maintenance dans la même industrie.
cadre
A. Construction d'un modèle d'éléments finis 3D : sur la base du modèle solide 3D développé et conçu, un modèle d'éléments finis dynamique est construit pour les calculs.Le modèle prend en compte les principaux composants de la connexion de transfert de force.Les forces sont transférées au roulement via la connexion, puis l'analyse de la résistance du roulement est effectuée.
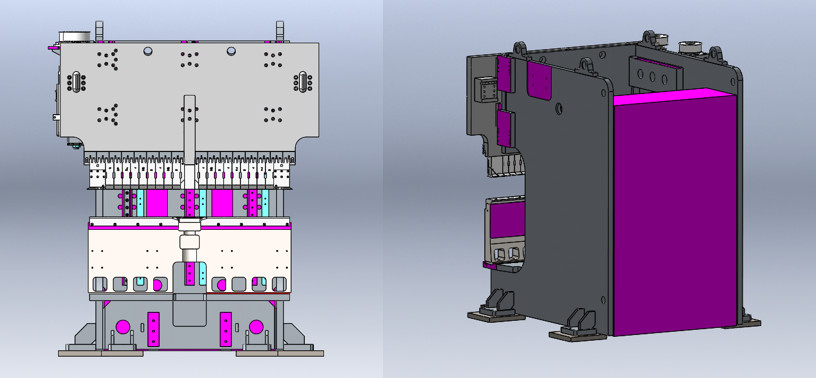
Fig. 1 Cintreuse de panneaux Modélisation dynamique par éléments finis d'une machine complète
B. Analyse des résultats de l'analyse statique : En raison de la vitesse d'usinage lente, l'analyse de la résistance peut être réduite à un problème statique.Sur la base de la charge de compression de la plaque et de la charge de flexion dans la direction verticale de la tête de coupe, les résultats de contrainte et de déformation sont présentés ci-dessous.La contrainte maximale apparaît dans la gorge du corps avec une contrainte maximale de 21,2 MPa et la déformation maximale apparaît dans l'extrémité supérieure du corps avec une déformation maximale de 0,30 mm.
Selon les résultats de l'analyse par éléments finis du cadre, l'acier Q345 a été choisi comme matériau ;le soudage par bouclier au dioxyde de carbone a été adopté ;un traitement de revenu a été effectué pour éliminer les contraintes générées par le soudage ;garantissant ainsi la précision, la stabilité et la rigidité élevée de l'équipement pour un fonctionnement à long terme.
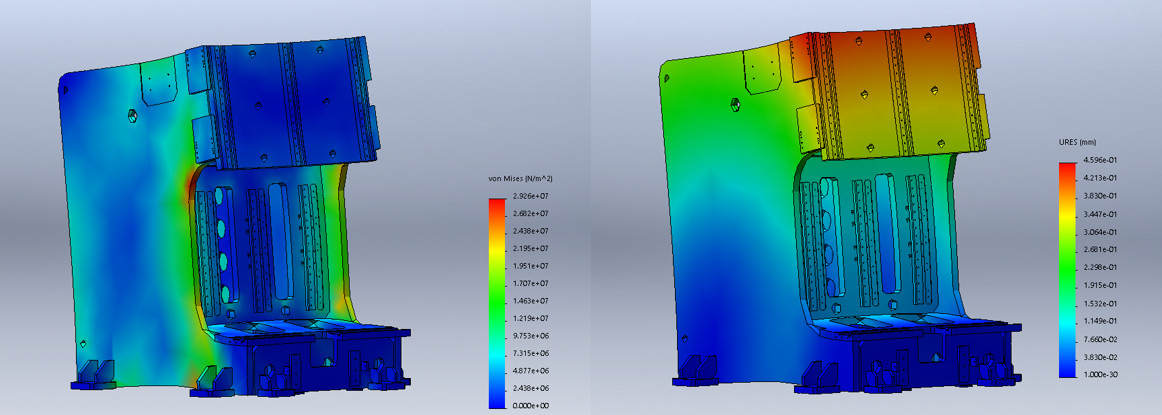
Fig. 2 Résultats de l'analyse de déformation par déplacement de contrainte du cadre
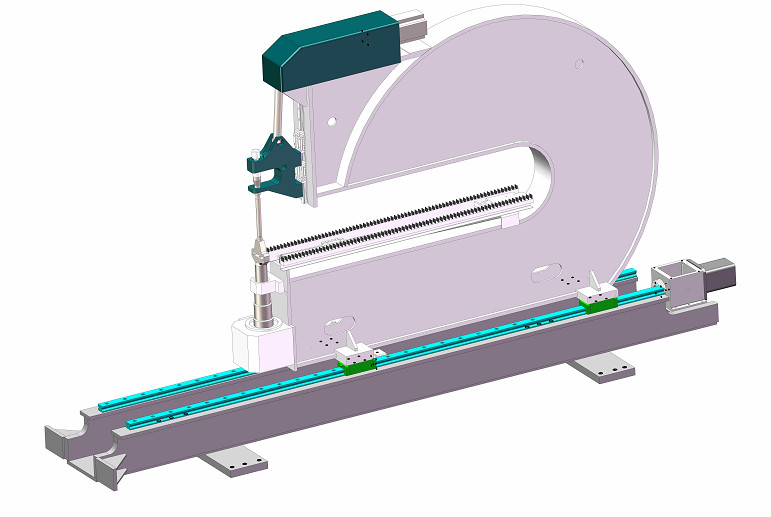
Bélier supérieur
Cette pièce se compose principalement d'un curseur, d'une vis mère à couple élevé, d'un réducteur, d'un rail de guidage, d'un servomoteur, etc.L'entraînement principal est contrôlé par un servomoteur et le mode de contrôle est un contrôle servosynchrone, qui peut garantir efficacement la précision du positionnement, la vitesse rapide et la contrôlabilité élevée.La lubrification de la vis mère et du rail de guidage adopte une lubrification automatique, et la graisse est 00#, ce qui garantit la durée de vie et la précision de la vis mère et du rail de guidage pour un fonctionnement de longue durée.
Résultats de l'analyse statique du curseur supérieur : le diagramme rénal de déplacement de contrainte du tableau supérieur montre que la contrainte maximale apparaît dans la partie supérieure, la contrainte maximale est de 152 mpa, la déformation maximale apparaît dans l'extrémité supérieure du tableau supérieur, la déformation maximale est de 0,15 mm
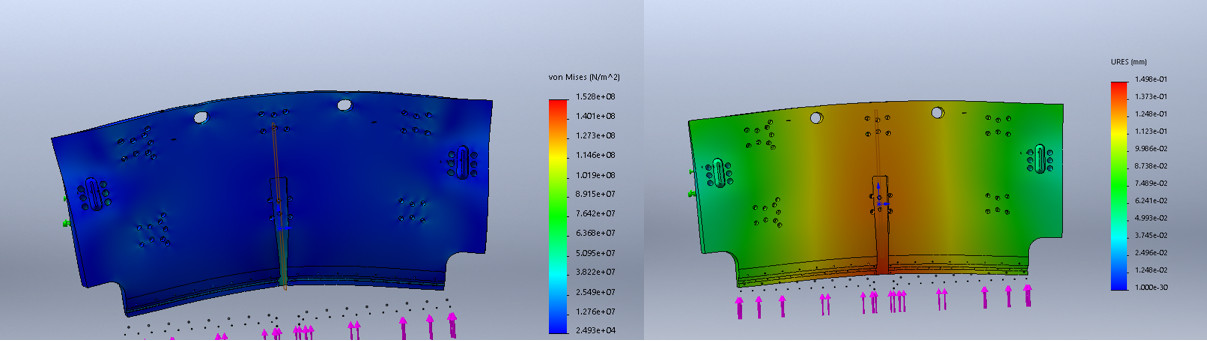
Fig. 3 Résultats de l'analyse du déplacement de contrainte du vérin
Selon les résultats de l'analyse par éléments finis du vérin, l'acier Q345 a été sélectionné comme matériau ;Un soudage avec protection CO2 a été utilisé ;un traitement de trempe a été effectué pour éliminer les contraintes causées par le soudage ;garantissant ainsi la précision, la stabilité et la rigidité élevée de l'équipement pour un fonctionnement à long terme.
Unité de pliage
La partie d'entraînement électrique de l'unité de pliage est entraînée par un servomoteur sans l'intervention d'un système hydraulique, ce qui présente de grands avantages en termes de réduction de l'usure des composants et de l'efficacité de la transmission, conformément à la politique d'économie d'énergie et de protection de l'environnement préconisée. par l'Etat.
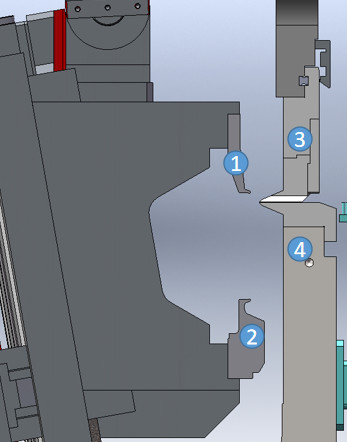
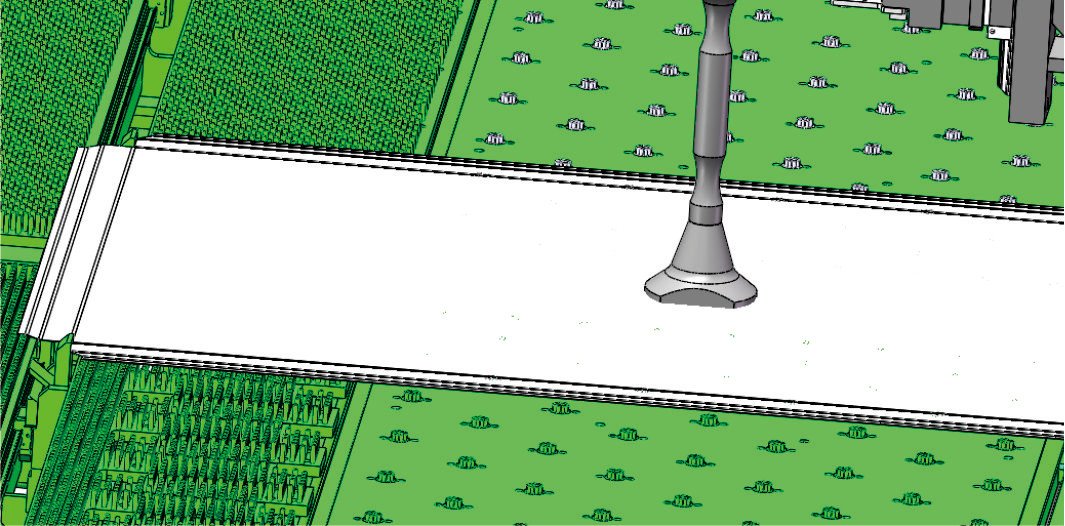
Selon le réglage des informations sur la feuille, le système calcule automatiquement la position du couteau de presse supérieur 3 et contrôle la distance entre le couteau de presse supérieur 3 et le couteau de presse inférieur 4 pour fixer la feuille ;selon le réglage du système, que ce cintrage soit vers le haut ou vers le bas, le couteau de presse inférieur 2 ou le couteau de presse supérieur 1 est commandé pour se déplacer rapidement vers la position de pliage ;selon différents angles de réglage, le couteau de pliage est contrôlé pour se déplacer vers la position calculée grâce à la formule de calcul d'angle brevetée pour terminer le pliage.
Selon les différentes manières de pliage, il peut être divisé en pliage d'angle, pliage en grand arc, pliage d'aplatissement, etc., lequel pliage d'angle est divisé en pliage vers le haut et pliage vers le bas.
Unité de presse supérieure
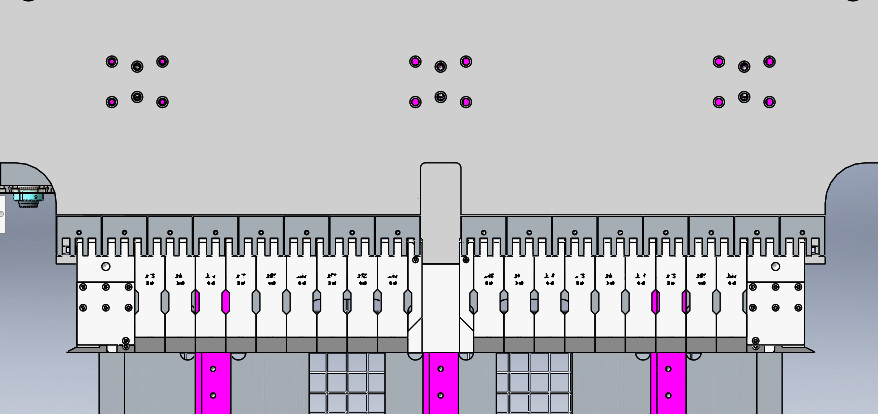
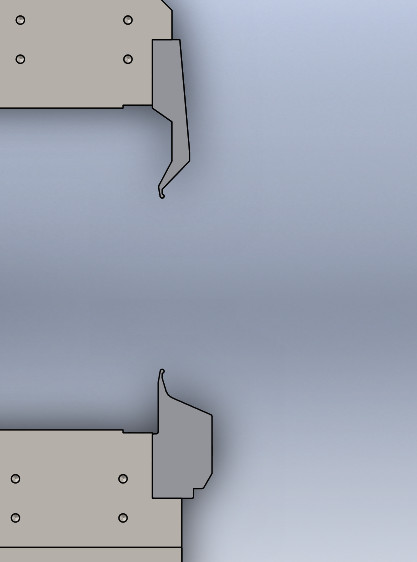
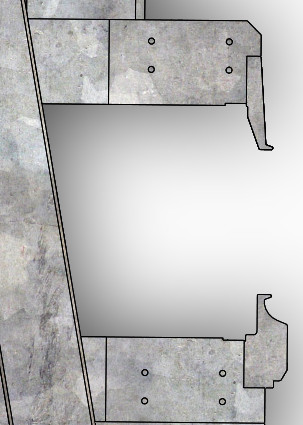
Fig.6 Unité de presse supérieure
L'unité de presse supérieure : faisant partie de tous les processus de pliage, le centre de pliage multilatéral entièrement servo EmbC est équipé d'une unité de presse supérieure spéciale qui peut être installée et réglée manuellement pour différentes longueurs de plaques.
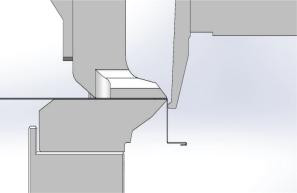
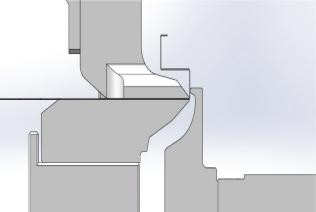
Afin de répondre aux exigences de la boîte de cintrage d'évitement, nous avons développé une matrice d'évitement spéciale.Avant le pressage, une partie de la matrice d'évitement est dans l'état avant le pressage dans le schéma et l'alimentation commence.Après alimentation, il est dans l'état après avoir appuyé sur le schéma et le pliage commence.Après pliage, le curseur supérieur se déplace.Pendant le mouvement du curseur supérieur, la partie A se déplacera automatiquement vers l'état avant d'appuyer.Une fois que le curseur supérieur s'est déplacé vers la position définie, le mouvement suivant commence.
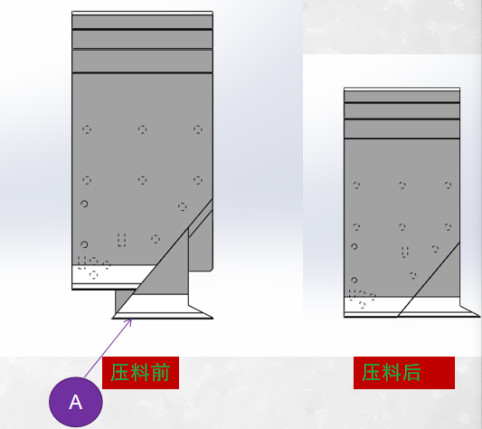
Fig.7 Évitement de la boîte de pliage
Outil
Les outils de pliage sont divisés en outils de pliage supérieurs et outils de pliage inférieurs.Des outils de pliage spéciaux peuvent être personnalisés en fonction des différentes exigences du client.
2. Unité d'alimentation en plaques :
Le mouvement, le serrage et la rotation de la tôle sont contrôlés respectivement par le robot 1, le montage 2 et le disque rotatif 3.Pendant tout le processus d'usinage, l'alimentation de la tôle est contrôlée par des servomoteurs, permettant une automatisation et un positionnement rapide, réduisant les temps de mouvement et augmentant l'efficacité.Grâce aux innovations structurelles et à l'application d'un asservissement complet, le serrage et la rotation de la tôle sont capables de maintenir la précision tout au long du processus de travail du centre de pliage multilatéral.Pour de nombreuses pièces complexes, même polygonales, une précision de rotation continue de 0,001 peut être garantie.
3.Unité de positionnement de plaque :
L'unité de positionnement de plaque se compose d'une goupille de positionnement gauche, d'une goupille de positionnement droite, d'une goupille de positionnement avant et d'une goupille de positionnement arrière ;les broches de positionnement gauche et droite positionnent la plaque à gauche et à droite.La goupille de positionnement avant et la goupille de positionnement arrière contrôlent la position avant et arrière de la plaque et garantissent que la plaque est parallèle aux couteaux de presse supérieurs et inférieurs, ce qui est utilisé pour garantir la précision de positionnement de la plaque.
L'unité de positionnement de la plaque peut positionner automatiquement la plaque et terminer automatiquement le cintrage multilatéral en une seule fois, ce qui réduit considérablement le temps de cycle de cintrage, contrôle l'erreur de cisaillement de la plaque au premier cintrage et garantit la précision du cintrage.
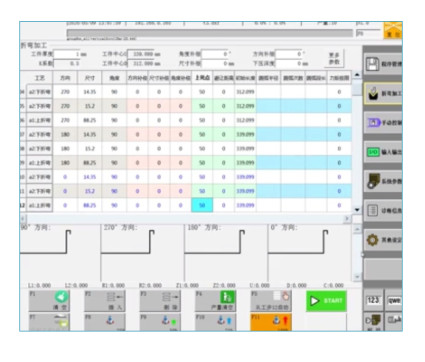
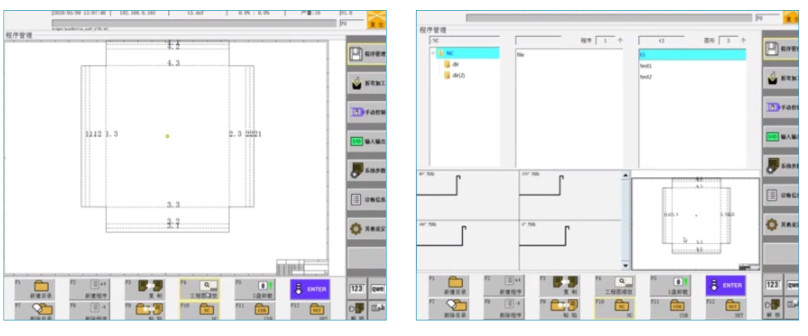
4. Système CNC
R : Les systèmes et logiciels CNC développés conjointement peuvent être appliqués et gérés rapidement et facilement.
B : Principales caractéristiques.
un) .Méthode de contrôle du bus EtherCAT à haute résistance aux interférences
b) Prend en charge la programmation directe, les données de pliage pour chaque étape peuvent être saisies sous la forme
c) Support pour flexion courbe
d) Servocommande entièrement électrique
e) Prise en charge de la compensation de flexion
f) Prise en charge de la programmation bidimensionnelle
Fonction de programmation 2D, importer des données de dessin DXF 2D, générer automatiquement le processus de pliage, la taille de pliage, l'angle de pliage, l'angle de rotation et d'autres données.Après confirmation, un traitement de pliage automatique peut être effectué
Liste de la partie principale
| Non. | Nom | Marque |
| 1 | Cadre | Sagesse |
| 2 | Outil | Sagesse |
| 3 | Unité de pliage | Sagesse |
| 4 | Système CNC | Sagesse |
| 5 | Servomoteur | Sagesse |
| 6 | Servomoteur | Sagesse |
| 7 | Rail | Sagesse |
| 8 | Vis à billes | Sagesse |
| 9 | Réducteur | Taïwan |
| 10 | Briseur | Schneider |
| 11 | Bouton | Schneider |
| 12 | Partie électrique | Schneider |
| 13 | Câble | Yicu |
| 14 | Détecteur de proximité | Omron |
| 15 | Palier | SKF/NSK/NAICH |
4) La conception, la fabrication, l'inspection et l'installation de la machine-outil répondent aux normes suivantes.
1, GB17120-1997
2. Q/321088JWB19-2012
3, GB14349-2011
Liste des pièces de rechange et des outils
| Non. | Nom | Qt. | Remarque |
| 1 | Boîte à outils | 1 | |
| 2 | Installer le tampon | 8 | |
| 3 | Iclé hexagonale intérieure | 1 jeu | |
| 4 | Pistolet de ravitaillement manuel | 1 | |
| 5 | Manuel du système CNC | 1 | |
| 6 | clé ouverte | 1 |





